 |
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ 
���N�싅�I��͕I�̏�Q�������ł��B
�����ŁA��X�͕I�̏�Q�ɒ��ڂ��A
�u�I�ւ̕��S�����炵�A�p�t�H�[�}���X�����コ���邽�߂̓�������v
���Ă���V�~�����[�V�����V�X�e�����J�����܂����B
���̃y�[�W�ł́A���̃V�X�e���J���ɂ��ĉ�����Ă����܂��B
 |
����͂���10�̒j�̎q�̓�������ł��B
���̃{�^�����N���b�N���Ĉ�x�����ɂȂ��Ă��������B

�����A���̏��N���A
�u���������߂����A�R���g���[�����悭���������A����ɁE�E�E�v
�u�ł��A�I�ւ̕��S�͌��炵�āA�P�K�͂������Ȃ��v
�Ƒ����̒��������Ă�����A�ǂ̂悤�ɂ�����悢�ł��傤���H
���̂悤�ɁA����ł̃j�[�Y��
�p�t�H�[�}���X�n�̃j�[�Y������A��Q�n�̃j�[�Y������܂� �B
�����������푽�l�ȃj�[�Y���ɖ�����������l�Ă��A
�w���ɐ������K�v������܂��B
�������A���ۂɂ͂���͔��ɓ�����Ƃł��B
�����ʼn�X��
���܂��܂ȃj�[�Y�ɕ����I�ɉ�������V�X�e�����J���������Ǝv���܂����B
�܂��A����ł悭����ӌ��ł����A
�u�̂��J���ȁI�v�ƌ��Ō����Ă��悭�킩��Ȃ��v
�u�w���̃|�C���g���O���t�Ō������Ă��悭�킩��Ȃ��v
�u�����̃p�\�R����3D����Ƃ��Ă݂������ǁE�E�E�v
���̂悤�Ȉӌ����悭���ɂ��܂��B
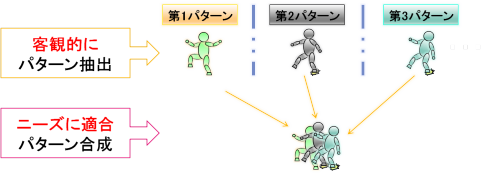
�����ŁA��X��
�����������܂��܂Ȉӌ��ɑ��āA�I�肪�������₷���V�X�e�����J�����A
�C���[�W�g���[�j���O�ɖ𗧂Ă����ƍl���܂����B
�����X��
�u���[�V�����E�V���Z�T�C�U�[�v
�Ƃ����V�����V�X�e�����J�����܂����B
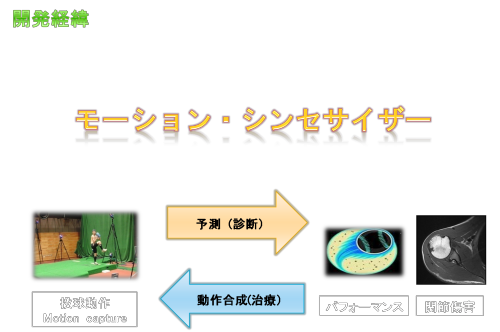
���̃V�X�e���ł́A������������[�V�����L���v�`���[���邱�Ƃɂ���āA
�p�t�H�[�}���X��ߏ��Q��\�����A
�ߏ��Q��h���p�t�H�[�}���X�����߂Ă��������
�R���s���[�^��ŃV�~�����[�V�������邱�Ƃ��ł��܂��B
 |
���[�V�����E�V���Z�T�C�U�[�̈�Ԃ̓����́A
�u���܂��܂ȃj�[�Y�ɕ����I�ɉ������邱�Ɓv�ɂ���܂��B
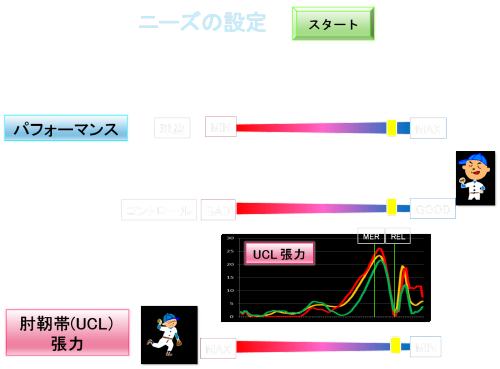
���[�V�����E�V���Z�T�C�U�[�ł́A
���z�̃X���C�h�o�[�������Ƃɂ���āA���܂��܂ȃj�[�Y��ݒ肵�Ă����܂��B
���̑���́A�~���[�W�b�N�E�V���Z�T�C�U�[�̃X���C�h�o�[�̑���Ɏ��Ă��܂�
�~���[�W�b�N�E�V���Z�T�C�U�[�ł́A�X���C�h�o�[�������Ƃɂ���āA
�V�����u���v�����o���܂����A
���[�V�����E�V���Z�T�C�U�[�ł́A�X���C�h�o�[�������Ƃɂ���āA
�V�����u�����v�����o���܂��B
�����āA�ݒ肵���j�[�Y�ɍł��߂�����������R���s���[�^��ō쐬���A
���߂�ꂽ���������3D����Ƃ��ĉ{���ł��܂��B
�������āA�C���[�W�g���[�j���O�ɖ𗧂ĂĂ����܂��B
���j�i3D����̉{���ɂ̓r���[���[�i�����j���K�v�ł��B�j
���Ƃ��A�u���������߂����v�Ƃ����ꍇ�́A
�����̃X���C�h�o�[���E���ɓ������Ă����A
���������߂邽�߂̓�����R���s���[�^��ɍ��o���܂��B
�t�ɍ����ɓ������Ă����A
�������x���Ȃ铮������o�����Ƃ��ł��܂��B
�A
�u�R���g���[�����悭�������v�Ƃ����Ƃ����ꍇ�́A
�R���g���[���̃X���C�h�o�[���E���ɓ������Ă����A
�R���g���[�����悭���邽�߂̓�����R���s���[�^��ɍ��o���܂��B
�t�ɍ����ɓ������Ă����R���g���[���������Ȃ铮������o�����Ƃ��ł��܂��B
���N�싅�I��̓�������ł́A�I�����̐x�я�Q���N�������Ƃ������ł����A
�I�����̐x�ђ��͂����炷������������߂����ꍇ�ɂ́A
�I�x�ђ��͂̃X���C�h�o�[���E���ɓ������Ă����悭�A
�t�ɍ����ɓ������Ă����A
�I�����̐x�ђ��͂傳���铊����������o�����Ƃ��ł��܂��B
���̃V�X�e���ł͂����������܂��܂ȃj�[�Y�ɑ��āA�����I�ɉ����Ă������Ƃ��ł��܂�
 |
�V�X�e�����J������ɂ�����A
�܂��͕I�̗͊w���f�����\�z���܂����B

�싅�̓�������ɂ����āA����̉������ɓ��O���g���N�������܂����A
���̂Ƃ��ɐ����I�ȕI�߂͕s����ɂȂ낤�Ƃ���̂�x�тŐ������Ă��܂��B
�������A���̐����͂��J��Ԃ����̂̌��E���Ă��܂��Ə�Q�������܂��B
���̌��ۂ�͊w���f���ŕ\���Ă����܂��B
�܂��͈ȉ��̃{�^���������āA�]���̗͊w���f�����݂Ă݂܂��傤�B
![����@�]��](button15741111111111.gif)
�]�����f���ł͕I�͋��L�Ɖ���O�̂Q�̉^�����s���܂��B
�����ł͕s���萫�����f��������Ă��܂���B
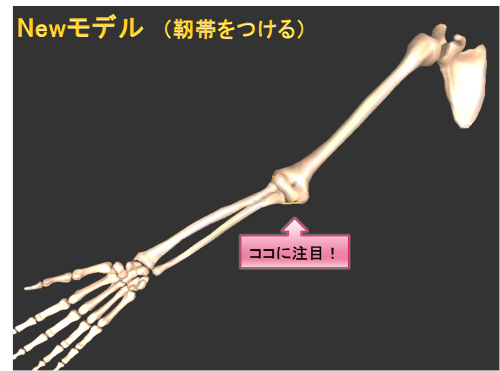
�����ŁA���̏]�����f���ɕI�̕s���萫��g�ݍ���ŐV�������f��������܂����B
�ȉ��̃{�^���������āA�I�̓��O���̕s���萫���݂Ă݂܂��傤�B

���ɁA���O���s���萫���g�ݍ���ł݂܂����B
�ȉ��̃{�^���������āA�I�̓��O���̕s���萫�������ɂȂ��Ă��������B

���̂悤�ɐV�������f���ł́A�]���̃��f���ɓ��O���s���萫�Ɠ��O���s���萫��t�����܂����B
�����炵���J���������f���Ƀg���N��������ƕI�߂̓O���O�����܂��B
���ɁA�I�̓��O���ɐx�т����Ă݂܂����B�i�����@2�{�@�O��1�{�j
�V�������f���̕I�Ƀg���N��^���Ă݂܂��ƁA�I�͂��O���O�����܂����A�����x�тŐ������悤�Ƃ��܂��B
�I�̕s���萫��x�тŐ������Ă���Ƃ����ł݂Ă݂܂��傤�B

�Ō�ɁA�S�g�̋ؓ������܂����B
�V�����؍��i-�x�у��f���̊����ł��B

 |
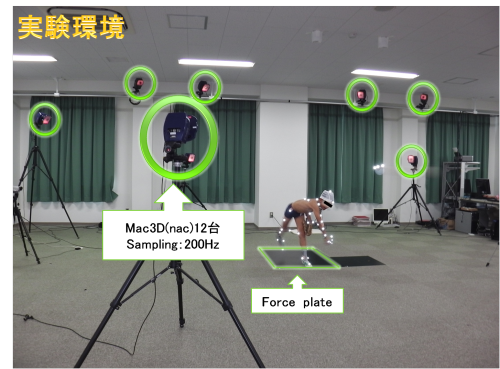
����̎����ł́A40�قǂ̐ԊO�����˃}�[�J�[��팱�҂ɓ\�t���A
12��̃J�����iSampling�F200Hz�j�ƃt�H�[�X�v���[�g���g���āA
���[�V�����E�L���v�`���[���܂����B

����̔팱�҂�1����10�̒j�̎q�ł��B
���w4�N���œ�������Ă��܂��B
���̂Ƃ��A�����ɋ����̑���ƃR���g���[���̕]�����s���܂����B
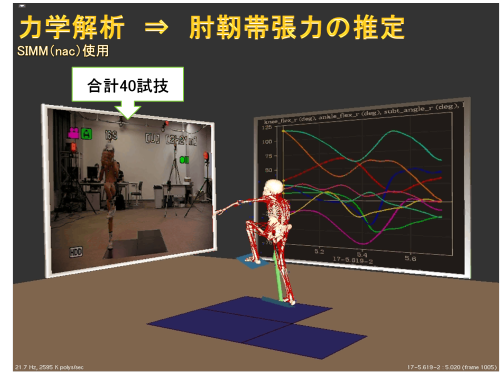
���[�V�����E�L���v�`���[�����ē���ꂽ�}�[�J�[��3�������W�f�[�^��
�͊w��̓\�t�g�E�F�A��SIMM�ɓ��͂��A
�V�����J�������؍��i���f�����g���āA
�I�̐x�ђ��͂𐄒肵�܂����B
���̔팱�҂ɂ́A���v40���Z�����Ă��炢�A�����œ���ꂽ
�@�@kinematics
�A�@kinetics
�B�@�����E�R���g���[���f�[�^
�����ׂāA�f�[�^�x�[�X�ɓo�^���܂����B
�����œ���ꂽ�f�[�^��1��1���ɂ��������܂��B
���̂������͂��邱�ƂŁA
���̑I��ɂƂ��čœK�ȓ�����V�~�����[�V�����i�V���Z�T�C�U�[�j���Ă����܂��B
 |
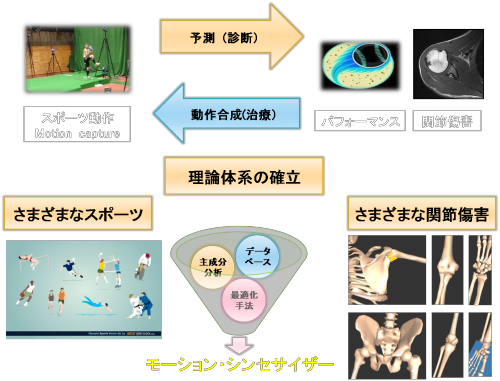
���[�V�����E�V���Z�T�C�U�[��
�@�@�f�[�^�x�[�X
�A�@�听������
�B�@�œK����@
��3���琬�藧���Ă��܂��B
�������A���[�V�����V���Z�T�C�U�[�̐S�����ɂȂ�܂��B
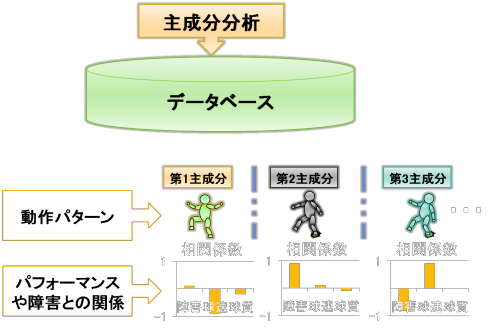
�܂��A�f�[�^�x�[�X�Ɏ听�����͂������Ă����܂��B
�听�����͂������邱�Ƃɂ��A�f�[�^�x�[�X���̏��v�w�I�ɕ��ނ��A��������p�^�[�����q�ϓI�ɒ��o���܂��B
�i�听�����͂̓�����A�e����p�^�[���݂͌��ɓƗ����Ă��܂��B�j
�����āA���̓���p�^�[���ƃp�t�H�[�}���X���Q�Ƃ̊W�𑊊W���ŕ\���܂��B
�听�����͂ŋ��߂�ꂽ�e�听���͐��`�㐔�I�ɍ������邱�Ƃ��ł��܂��B
�j�[�Y��ݒ肵�A���̃j�[�Y�ɍł��K������听���̑g�ݍ��킹���R���s���[�^�Ōv�Z���܂��i�œK���v�Z�j�B
�ŏI�I�ɃR���s���[�^�[��ō������ꂽ�����3D����ʼn{�����邱�Ƃ��ł��܂��B

 |
�����ł́A���鏭�N�싅�����Ώۂɂ��āA
40���Z�̓�������Ƌ����ƃR���g���[���̃f�[�^��p���āA
�p�t�H�[�}���X�n�̃j�[�Y�ɉ��������Ǝv���܂��B
���������߂A�R���g���[�����悭�������B
����ł悭����j�[�Y�ł����A
���������j�[�Y�������߂ɂ͂ǂ̂悤�ȓ�������ɂ��Ă����Ƃ悢�ł��傤���H
���j�@���̃V�~�����[�V�����̌��ʂ́A���̏��N�싅�I��Ƀf�[�^��p���Ă��܂�����A
�@�@�@���̑I��ɓ����������ʂ��\������܂��B
�@�@�@���ՓI�ɂ��ׂĂ̏��N�싅�I��ɓ��Ă͂܂�킯�ł͂Ȃ��̂Œ��ӂ��K�v�ł�
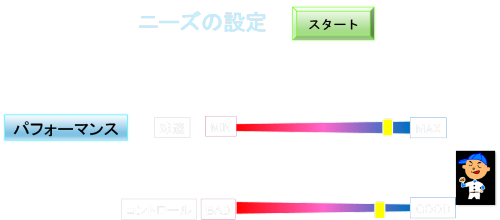
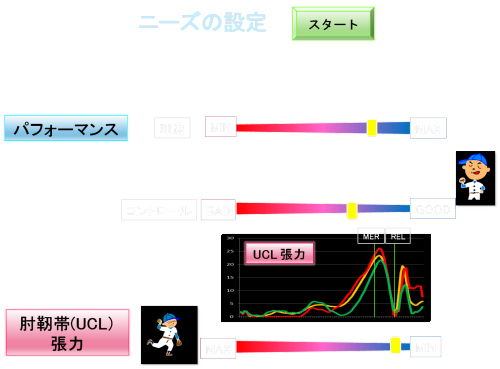
���̃V�X�e���ł́A���̂悤�ȃX���C�h�o�[��p���āA�j�[�Y�̐ݒ���s���Ă����܂��B
�u���������߂A�R���g���[�����悭�������v
�Ƃ����j�[�Y������������߂�ꍇ�ɂ́A
�����̃X���C�h�o�[���E���iMAX���j�Ɉړ������A
�R���g���[���̃X���C�h�o�[���E���iGOOD���j�Ɉړ������܂��B
�t�ɁA�u�������������A�R���g���[������������v���߂ɂ́A
�����̃X���C�h�o�[�������iMIN���j�Ɉړ������A
�R���g���[���̃X���C�h�o�[�������iBAD���j�Ɉړ������܂��B
�j�[�Y�̐ݒ��A���[�V�����E�V���Z�T�C�U�[�ŐV������������܂��B
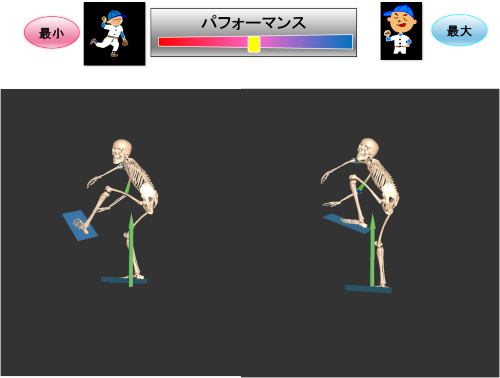
��ʍ��́A�p�t�H�[�}���X�i�����E�R���g���[���j�������Ă��܂�����p�^�[���A
��ʉE�́A�p�t�H�[�}���X�i�����E�R���g���[���j���悭�Ȃ铮��p�^�[���ł��B
���L�̓���{�^�����N���b�N���āA��������Ă��������B
���ʂ���̎��_
������̎��_
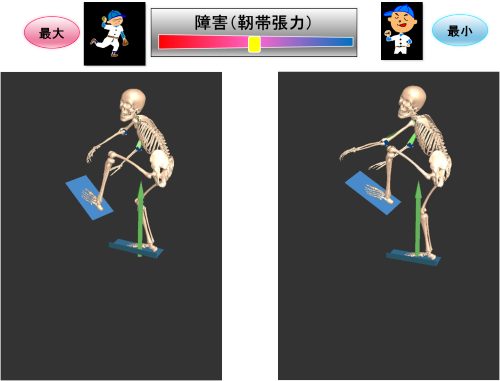
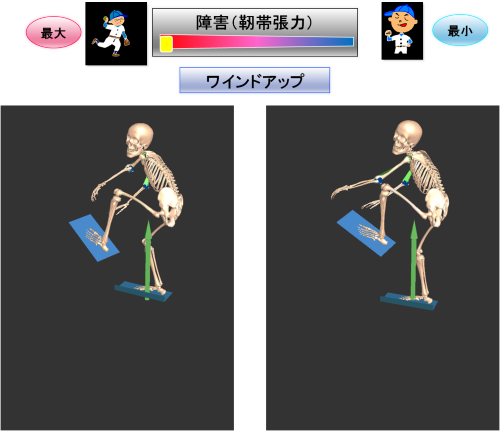
����ł́A���̓���̃|�C���g��Î~���p���āA�������܂��B
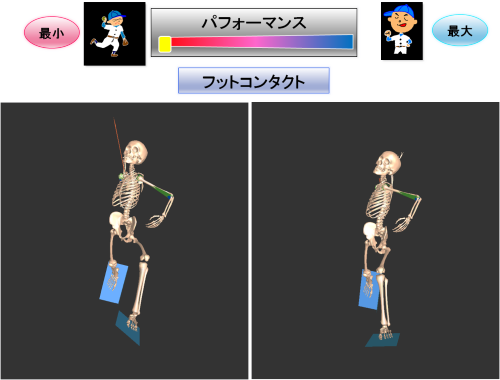
��̐}�́A�t�b�g�R���^�N�g���̎p���������Ă��܂����A
���ڂ��ׂ��_�͍������i���ݍ��r�j�̎p���ł��B
��ʍ��i�p�t�H�[�}���X��������j�Ɖ�ʉE�i�p�t�H�[�}���X���オ��j�Ƃ̈Ⴂ���킩��ł��傤���H
�i�����ł͎p���̈Ⴂ�������Č��t�ł͕\�����܂���B���t�ł̕\���͌���ނ��Ƃ���������ł��B���o�I�ɈႢ�������Ƃ��Ă��������j
�������̎p�����قȂ�܂����A����ɔ����̊��̉�����قȂ�̂��݂���ł��傤���H
���āA�t�b�g�R���^�N�g���̎p���̈Ⴂ�������Ă������Ǝv���܂����A
�t�b�g�R���^�N�g���ɂ����������p���ɂ����Ă������߂ɂ́A
������O�̃t�F�[�Y�łǂ������p���ɂ����Ă������Ƃ��K�v�ł��傤���H
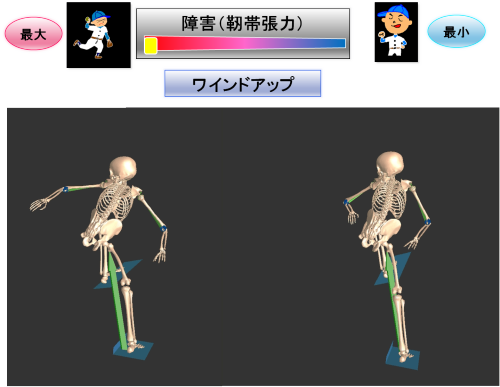
�����ł́A���C���h�A�b�v���̎p�����Љ�܂��B
�I��Ɏw������Ƃ��ɂ́A�t�b�g�R���^�N�g���̎p�����w��������A���C���h�A�b�v���̎p�����w������ق����͂邩�ɗe�ՂɂȂ邩��ł��B
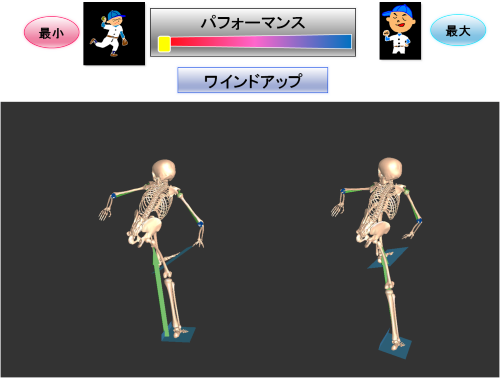
��̐}�́A���C���h�A�b�v���̎p���������Ă��܂����A
���ڂ��ׂ��_�͉E�����i�����j����̊��Ɏ���p���ł��B
��ʍ��i�p�t�H�[�}���X��������j�Ɖ�ʉE�i�p�t�H�[�}���X���オ��j�Ƃ̈Ⴂ���킩��ł��傤���H
�i�����ł͎p���̈Ⴂ�������Č��t�ł͕\�����܂���B���t�ł̕\���͌���ނ��Ƃ���������ł��B���o�I�ɈႢ�������Ƃ��Ă��������j
���̃��C���h�A�b�v�̎p���́A�I��Ɏw�����₷���A
���̎p����ς��邱�ƂŁA�t�b�g�R���^�N�g���̎p������[�X���̎p���ɂ��ω���^���A
�͂��܂��A������R���g���[���ɂ��ω���^���邱�ƂɂȂ�܂��B
�����Ŏ������V�~�����[�V�������ʂ́A
���疜�ɋy�ԑ��W������͂��ē��������ʂł���A
���̘A���̂��Ƃ���X��
�u���v�w�I�ȉ^���A���v
�ƌĂ�ł��܂��B
 |
�����قǂ́A�p�t�H�[�}���X�Ɋւ��铮��������܂������A
���x�͕I�̐x�ђ��͂̃f�[�^�������āA
�p�t�H�[�}���X�n+�I��Q�\�h�̃j�[�Y�ɉ��������Ǝv���܂��B
�u���������߂A�R���g���[�����悭�������B�v
�Ƃ����j�[�Y�ɉ����āA
�I�̐x�ђ��́i���������x�сj��ጸ�����邽�߂ɂ́A
�ǂ̂悤�ȓ�������ɂ��Ă����Ƃ悢�ł��傤���H
���j�@���̃V�~�����[�V�����̌��ʂ́A���̏��N�싅�I��Ƀf�[�^��p���Ă��܂�����A
�@�@�@���̑I��ɓ����������ʂ��\������܂��B
�@�@�@���ՓI�ɂ��ׂĂ̏��N�싅�I��ɓ��Ă͂܂�킯�ł͂Ȃ��̂Œ��ӂ��K�v�ł�
����ł́A����܂łƓ��l�ɃX���C�h�o�[��p���āA�j�[�Y�̐ݒ���s���Ă����܂��B
�u���������߂A�R���g���[�����悭�������B����ɕI�̐x�ђ��͂��ጸ�������v
�Ƃ����j�[�Y������������߂�ꍇ�ɂ́A
�����̃X���C�h�o�[���E���iMAX���j�Ɉړ������A
�R���g���[���̃X���C�h�o�[���E���iGOOD���j�Ɉړ������܂��B
�����āA�����
�I�̐x�ђ��́iUCL)�̃X���C�h�o�[���E���iMIN���j�Ɉړ������܂��B
�t�ɁA�u�������������A�R���g���[���������Ȃ�A����ɕI�̐x�ђ��͂����傳����v
���߂ɂ́A
�����̃X���C�h�o�[�������iMIN���j�Ɉړ������A
�R���g���[���̃X���C�h�o�[�������iBAD���j�Ɉړ������܂��B
�����āA�����
�I�̐x�ђ��́iUCL)�̃X���C�h�o�[�������iMAX���j�Ɉړ������܂��B
�j�[�Y�̐ݒ��A���[�V�����E�V���Z�T�C�U�[�ŐV������������܂��B
�I�̐x�ђ��̓o�[���E���iMIN)�Ɉړ������
�I�̓��������x�ђ��͂̌o���f�[�^�́A�O���t�̗̐��ɂȂ�܂��B
�܂�A���ρi���F�j�������͂̃s�[�N�Ɨ͐ς��������Ȃ�܂��B
�I�̐x�ђ��̓o�[�������iMAX)�Ɉړ������
�I�̓��������x�ђ��͂̌o���f�[�^�́A�O���t�̐Ԃ̐��ɂȂ�܂��B
�܂�A���ρi���F�j�������͂̃s�[�N�Ɨ͐ς��傫���Ȃ�܂��B
��ʍ��́A���ׂẴj�[�Y�����Ȃ�����p�^�[���A
��ʉE�́A���ׂẴj�[�Y��������p�^�[���ł��B
���L�̓���{�^�����N���b�N���āA��������Ă��������B
���ʂ���̎��_
������̎��_
����ł́A���̓���̃|�C���g��Î~���p���āA�������܂��B
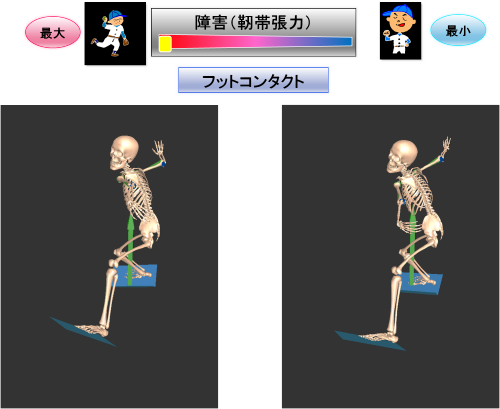
��̐}�́A�t�b�g�R���^�N�g���̎p���������Ă��܂����A
���ڂ��ׂ��_�͑̊��̔P��ł��B�i�����b���̌��������Ⴄ�Ǝv���܂��j
��ʍ��i�x�ђ��͂�������j�Ɖ�ʉE�i�x�ђ��͂�����j�Ƃ̈Ⴂ��������ł��傤���H
�i�����ł͎p���̈Ⴂ�������Č��t�ł͕\�����܂���B���t�ł̕\���͌���ނ��Ƃ���������ł��B���o�I�ɈႢ�������Ƃ��Ă��������j
���āA�t�b�g�R���^�N�g���̎p���̈Ⴂ�������Ă������Ǝv���܂����A
�t�b�g�R���^�N�g���ɂ����������p���ɂ����Ă������߂ɂ́A
������O�̃t�F�[�Y�łǂ������p���ɂ����Ă������Ƃ��K�v�ł��傤���H
�����ł́A���C���h�A�b�v���̎p�����Љ�܂��B
�I��Ɏw������Ƃ��́A�t�b�g�R���^�N�g���̎p�����w��������A���C���h�A�b�v���̎p�����w������ق����͂邩�ɗe�ՂɂȂ邩��ł��B
��̐}�́A���C���h�A�b�v���̎p����\�����Ă��܂��B
�����قǁA�x�ђ��͂�ጸ�����邽�߂ɂ́A�t�b�g�R���^�N�g�ő̊���P��Ȃ���Ȃ�Ȃ��Ɛ������܂����B
����̐}�́A���C���h�A�b�v������̊��̔P����������Ă����K�v�����邱�Ƃ������Ă��܂��B
��̐}�́A���C���h�A�b�v�̎p���������猩�����̂ł��B
��ʍ��i�x�ђ��͂�������j�Ɖ�ʉE�i�x�ђ��͂�����j�Ƃ̈Ⴂ��������ł��傤���H
�i�����ł͎p���̈Ⴂ�������Č��t�ł͕\�����܂���B���t�ł̕\���͌���ނ��Ƃ���������ł��B���o�I�ɈႢ�������Ƃ��Ă��������j
���̃��C���h�A�b�v�̎p���́A�I��Ɏw�����₷���A
���̎p����ς��邱�ƂŁA�t�b�g�R���^�N�g���̎p������[�X���̎p���ɂ��ω���^���A
�͂��܂��A������R���g���[���A�����ĕI�̐x�ђ��͂ɂ��ω���^���邱�ƂɂȂ�܂��B
�����Ŏ������V�~�����[�V�������ʂ́A���疜�ɋy�ԑ��W������͂��ē��������ʂł���A���̘A���̂��Ƃ���X��
�u���v�w�I�ȉ^���A���v
�ƌĂ�ł��܂�
![����̓W�]](logo21133112163.gif) |
�ȏ�A ���̃y�[�W�ł́A�I�̏�Q�ɒ��ڂ��A
�I�ւ̕��S�����炵�A�p�t�H�[�}���X�����コ���邽�߂̓�������V�~�����[�V����
�ɂ��Đ������Ă��܂����B
����̓W�]�ł��B
����܂łɁA�Q�̃V�~�����[�V����������������܂������A���[�V�����E�V���Z�T�C�U�[�ł͂��̑��ɂ����܂��܂ȃV�~�����[�V�������s�����Ƃ��ł��܂��B
���[�V�����E�V���Z�T�C�U�[�͐V������͋Z�p�ł��B
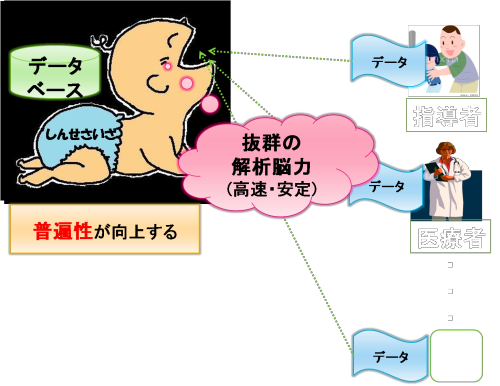
���܂̂Ƃ���̓f�[�^�x�[�X�͂܂�����قǑ傫���Ȃ��A������܂ꂽ����̐Ԃ����ł��B�������A�ӂ��̐Ԃ����ƈႤ�̂�
�u���Q�̉�͔]�́v
�������Ă��邱�Ƃł��B
�܂�A�����ň��肵����͂��\�ł���A���̗��_�̌n�͂قڊm�����܂����B
����́A���܂��܂ȋ@�ցE�Ǝ�̕��X�Ƌ��͂��Ă��܂��܂ȃf�[�^�����W���A�f�[�^�x�[�X���g�����Ă��������ƍl���Ă��܂��B
�����A
���̐Ԃ����Ƀf�[�^��H�ׂ�����ΐH�ׂ�����قǁA���̃V�X�e���͐������A�������瓾����m���̕��Ր��ƐM�����͎����I�Ɍ��シ��悤�ɂȂ��Ă��܂��B
�܂��A���[�V�����E�V���Z�T�C�U�[�͂��܂��܂ȃX�|�[�c�A�����Ă��܂��܂Ȋߏ�Q�ʼn��p���邱�Ƃ��ł��܂��B
����A�����̋��Z�ɉ��p���Ă��������ƍl���Ă��܂��B
�@�@�@�@�@�@�@�@
|