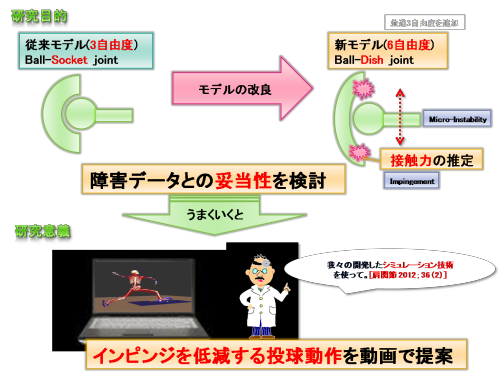
そこで、我々は従来のモデルを改良(並進3自由度を追加)して、新しいball-Dish joint(6自由度)となる新しいモデルを開発することとしました。
この新しいモデルでは微小不安定性を表現でき、接触力を推定することによってインピンジメントも表現することができます。
この推定した接触力と障害データとの妥当性を検討することが本研究の目的です。
こうしたことがうまくいきますと、昨年開発したシミュレーション技術を用いて、
「インピンジメントを低減できる投球動作を動画で提案」
ということができるようになります。
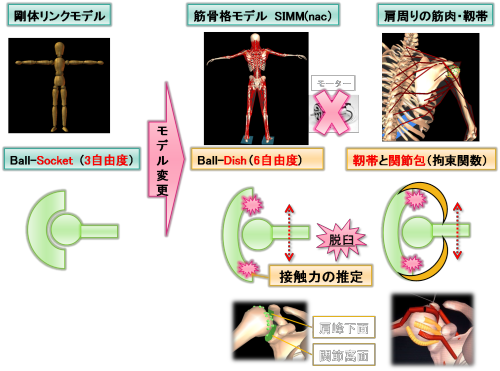
モデルの変更点ですが、
我々は筋骨格モデル(SIMM Nac社)を用いています。これによって、モーターという考え方はなくなり、より人間に近づいたモデルとなります。
そして、上述したBall-Dish joint(6自由度)を用いて、接触力を推定するためのsurfaceを肩峰下面と関節窩面の両方に設置しました。
しかし、この状態で投球動作をさせますと肩関節は容易に脱臼してしまうため、さらに関節上腕靱帯と関節包(拘束関数)を設定しました。
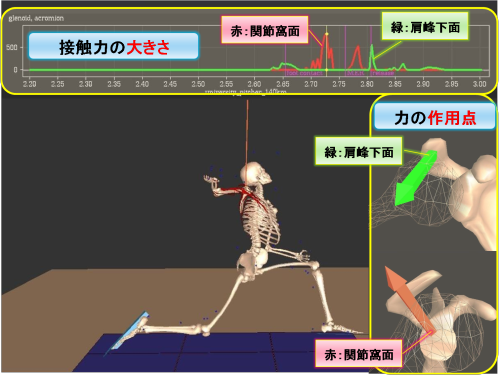
上記のモデルにmotion-captureデータを組み込み、動力学解析を行っていきました。 以下はそのときの算出項目です。
① 接触力の大きさ (赤:関節窩面 緑:肩峰下面)
② 接触力の力の作用点 (赤:関節窩面 緑:肩峰下面)
そして、推定した接触力について、障害データと合致するか検証してみました。
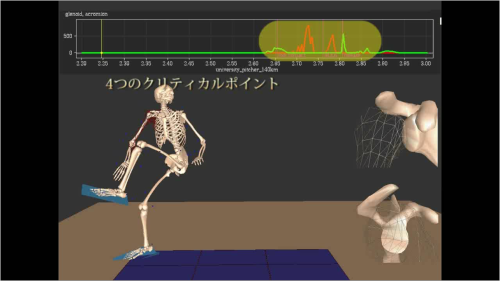

投球動作中は以下の4つのクリティカルポイントを認めました。
① アーリーコッキング
② レイトコッキング
③ 加速期
④ リリース
その時の肩関節内の接触力の推移を動画でみることができます。上記の動画ボタンをクリックしてください。
上記のクリティカルポイントで最も危険だったポイントはレイトコッキングフェーズで、このとき上腕骨頭の大結節と関節窩の後上方部が強く接触していました。
横からの視点
上からの視点
後ろからの視点
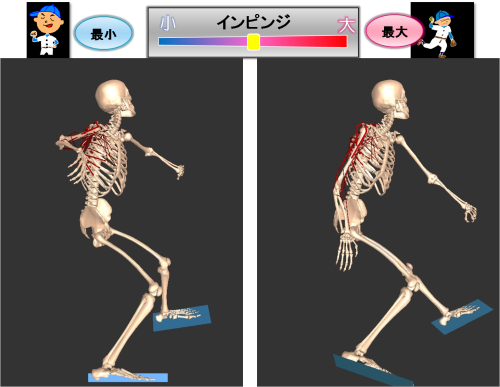
最後に、主成分分析と最適化手法を用いて、球速を落とさずにインピンジメントを防ぐ投球動作をコンピュータ上で探索した例を示します。
右上はインピンジメントを最大にしたとき動作で、最も病変ができやすく、発症しやすくなる投球動作です。
左上はインピンジメントを最小にしたとき動作で、最も病変ができにくく、発症しにくくなる投球動作です。
上記の動画ボタンをクリックして、動画を見てください。
|